Homomorphisms of Lifted Planning Tasks: The Case for Delete-Free Relaxation Heuristics
Rostislav Horčík, Daniel Fišer, Alvaro Torralba
[AAAI-22] Main Track
Abstract:
Classical planning tasks are modelled in PDDL which is a schematic language based on first-order logic. Most of the current planners turn this lifted representation into a propositional one via a grounding process. However, grounding may cause an exponential blowup. Therefore it is important to investigate methods for searching for plans on the lifted level. To build a lifted state-based planner, it is necessary to invent lifted heuristics. We introduce maps between PDDL tasks preserving plans allowing to transform a PDDL task into a smaller one. We propose a novel method for computing lifted (admissible) delete-free relaxed heuristics via grounding of the smaller task and computing the (admissible) delete-free relaxed heuristics there. This allows us to transfer the knowledge about relaxed heuristics from the grounded level to the lifted level.
Introduction Video
Sessions where this paper appears
-
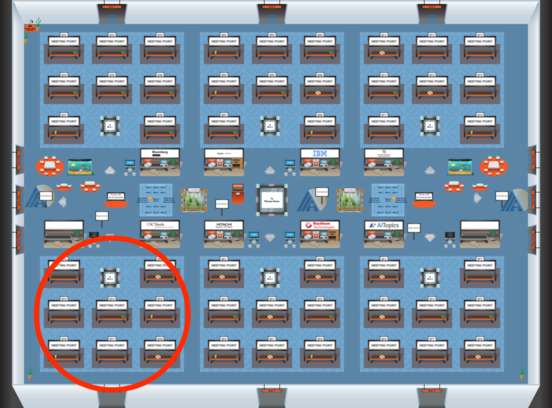
Poster Session 3
 Fri, February 25 8:45 AM - 10:30 AM (+00:00)
Fri, February 25 8:45 AM - 10:30 AM (+00:00)
 Blue 4
Blue 4
-
Poster Session 12
Mon, February 28 8:45 AM - 10:30 AM (+00:00)
Blue 4
-
Oral Session 12
Mon, February 28 10:30 AM - 11:45 AM (+00:00)
Blue 4